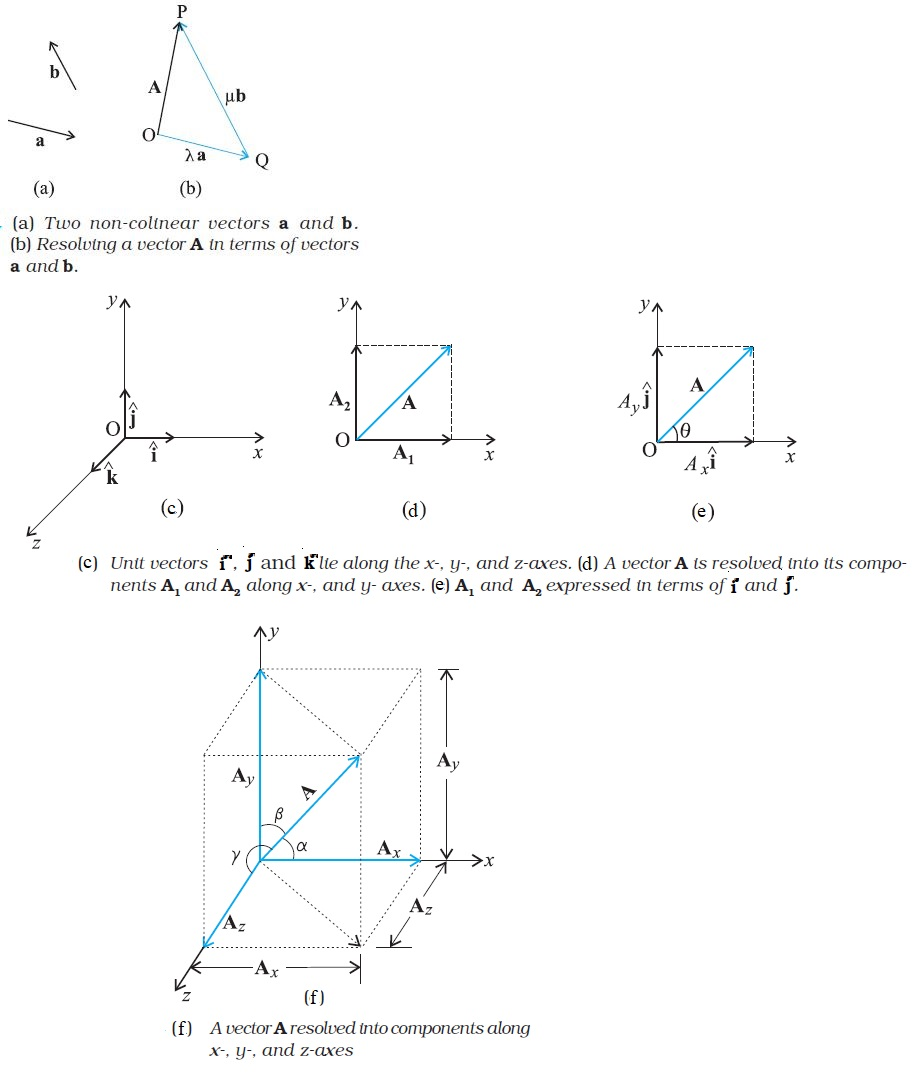
Let `veca` and `vecb` be any two non-zero vectors in a plane with different directions and let `vecA` be another vector in the same plane(Fig.).
`vecA` can be expressed as a sum of two vectors – one obtained by multiplying `veca` by a real number and the other obtained by multiplying `vecb` by another real number. Then, we have
`vecA = vec(OP) = vec(OQ) + vec(QP)`
But since `vec(OQ)` is parallel to `veca`, and `vec(QP)` is parallel to `vecb`, we can write
`vec(OQ)=lamdaveca`, and `vec(QP)=muvecb`
where `lamda` and `mu` are real numbers.
`:. vecA=lamdaveca+muvecb`
We say that `vecA` has been resolved into two component vectors `lamda veca` and `mu vecb` along `veca` and `vecb` respectively.
Using this method one can resolve a given vector into two component vectors along a set of two vectors – all the three lie in the same plane. It is convenient to resolve a general vector along the axes of a rectangular coordinate system using vectors of unit magnitude.
`\color{fuchsia} ★ \color{fuchsia} ul{\mathbf( "Unit Vector")} `
A unit vector is a vector of unit magnitude and points in a particular direction.
Unit vectors along the x-, y and z-axes of a rectangular coordinate system are denoted by `hati, hatj` and `hatk`, respectively, as shown in Fig. (c).
`\color{red} ✍️` It has no dimension and unit.
`\color{red} ✍️` It is used to specify a direction only.
`\color{red} ✍️` Since these are unit vectors, we have
`|hati|= |hatj| =|hatk|=1`
These unit vectors are perpendicular to each other.
`\color{red} ✍️` If we multiply a unit vector, say `vecn` by a scalar, the result is a vector.
`lamda hatn=veclamda`. In general, a vector `vecA` can be written as `vecA = |vecA| hatn`
where `hatn` is a unit vector along `vecA`.
`\color{fuchsia} ★ \color{fuchsia} ul{\mathbf( "Resolution of Vectors in 2-Dimensions")} `
We can now resolve a vector `vecA` in terms of component vectors that lie along unit vectors `hati` and `hatj`. Consider a vector `vecA` that lies in x-y plane as shown in Fig. (d). We draw lines from the head of `vecA` perpendicular to the coordinate axes as in Fig. (d), and get vectors `vecA_1` and `vecA_2`.
`vecA_1 + vecA_2 = vecA`
we have, `vecA_1=A_xhati, vecA_2=A_yhatj`
where `A_x` and `A_y` are real numbers.
Thus, `vecA=A_xhati+A_yhatj` [This is represented in Fig. (e).]
`A_x =` x- component of vector `vecA`
`A_y =` y- component of vector `vecA`
`\color{red} ✍️` `A_x` is itself not a vector, but `A_xhati` is a vector, and so is `A_y hatj`.
`\color{red} ✍️` Magnitude, `A_x=Acos theta, A_y=Asin theta`
where `theta=` `vecA` makes an angle with x-axis.
`\color{red} ✍️` A component of a vector can be positive, negative or zero depending on the value of `theta`.
Now, we have two ways to specify a vector `vecA` in a plane. It can be specified by :
`(i)` its magnitude A and the direction θ it makes with the x-axis; or
`(ii)` its components `A_x` and `A_y`
If `A_x` and `A_y` are given, `A` and `θ` can be obtained as follows :
`A_x^2+A_y^2=A^2cos^2theta+A^2sin^2theta=A^2`
`A=sqrt(A_x^2+A_y^2)`
and `tan theta=(A_y)/(A_x), theta=tan^(-1)[(A_y)/(A_x)]`
`\color{fuchsia} ★ \color{fuchsia} ul{\mathbf( "Resolution of Vectors in 3-Dimensions")} `
So far we have considered a vector lying in an x-y plane. The same procedure can be used to resolve a general vector `vecA` into three components along x-, y-, and z-axes in three dimensions.
If `alpha,beta` and `gamma` are the angles between `vecA` and the x-, y-, and z-axes, respectively Fig. (f), we have
`A_x = A cos alpha, A_y = A cos beta, A_z =Acos gamma`
`\color{red} ✍️` In general, we have `vecA=A_xhati + A_y hatj + A_z hatk`
`\color{red} ✍️` The magnitude of vector `vecA` is `A=sqrt(A_x^2 +A_y^2 +A_z^2)`
`\color{red} ✍️` A position vector `vecr` can be expressed as `vecr=xhati+yhatj+zhatk`
where `x, y,` and `z` are the components of `r` along `x-, y-, z`-axes, respectively.
Let `veca` and `vecb` be any two non-zero vectors in a plane with different directions and let `vecA` be another vector in the same plane(Fig.).
`vecA` can be expressed as a sum of two vectors – one obtained by multiplying `veca` by a real number and the other obtained by multiplying `vecb` by another real number. Then, we have
`vecA = vec(OP) = vec(OQ) + vec(QP)`
But since `vec(OQ)` is parallel to `veca`, and `vec(QP)` is parallel to `vecb`, we can write
`vec(OQ)=lamdaveca`, and `vec(QP)=muvecb`
where `lamda` and `mu` are real numbers.
`:. vecA=lamdaveca+muvecb`
We say that `vecA` has been resolved into two component vectors `lamda veca` and `mu vecb` along `veca` and `vecb` respectively.
Using this method one can resolve a given vector into two component vectors along a set of two vectors – all the three lie in the same plane. It is convenient to resolve a general vector along the axes of a rectangular coordinate system using vectors of unit magnitude.
`\color{fuchsia} ★ \color{fuchsia} ul{\mathbf( "Unit Vector")} `
A unit vector is a vector of unit magnitude and points in a particular direction.
Unit vectors along the x-, y and z-axes of a rectangular coordinate system are denoted by `hati, hatj` and `hatk`, respectively, as shown in Fig. (c).
`\color{red} ✍️` It has no dimension and unit.
`\color{red} ✍️` It is used to specify a direction only.
`\color{red} ✍️` Since these are unit vectors, we have
`|hati|= |hatj| =|hatk|=1`
These unit vectors are perpendicular to each other.
`\color{red} ✍️` If we multiply a unit vector, say `vecn` by a scalar, the result is a vector.
`lamda hatn=veclamda`. In general, a vector `vecA` can be written as `vecA = |vecA| hatn`
where `hatn` is a unit vector along `vecA`.
`\color{fuchsia} ★ \color{fuchsia} ul{\mathbf( "Resolution of Vectors in 2-Dimensions")} `
We can now resolve a vector `vecA` in terms of component vectors that lie along unit vectors `hati` and `hatj`. Consider a vector `vecA` that lies in x-y plane as shown in Fig. (d). We draw lines from the head of `vecA` perpendicular to the coordinate axes as in Fig. (d), and get vectors `vecA_1` and `vecA_2`.
`vecA_1 + vecA_2 = vecA`
we have, `vecA_1=A_xhati, vecA_2=A_yhatj`
where `A_x` and `A_y` are real numbers.
Thus, `vecA=A_xhati+A_yhatj` [This is represented in Fig. (e).]
`A_x =` x- component of vector `vecA`
`A_y =` y- component of vector `vecA`
`\color{red} ✍️` `A_x` is itself not a vector, but `A_xhati` is a vector, and so is `A_y hatj`.
`\color{red} ✍️` Magnitude, `A_x=Acos theta, A_y=Asin theta`
where `theta=` `vecA` makes an angle with x-axis.
`\color{red} ✍️` A component of a vector can be positive, negative or zero depending on the value of `theta`.
Now, we have two ways to specify a vector `vecA` in a plane. It can be specified by :
`(i)` its magnitude A and the direction θ it makes with the x-axis; or
`(ii)` its components `A_x` and `A_y`
If `A_x` and `A_y` are given, `A` and `θ` can be obtained as follows :
`A_x^2+A_y^2=A^2cos^2theta+A^2sin^2theta=A^2`
`A=sqrt(A_x^2+A_y^2)`
and `tan theta=(A_y)/(A_x), theta=tan^(-1)[(A_y)/(A_x)]`
`\color{fuchsia} ★ \color{fuchsia} ul{\mathbf( "Resolution of Vectors in 3-Dimensions")} `
So far we have considered a vector lying in an x-y plane. The same procedure can be used to resolve a general vector `vecA` into three components along x-, y-, and z-axes in three dimensions.
If `alpha,beta` and `gamma` are the angles between `vecA` and the x-, y-, and z-axes, respectively Fig. (f), we have
`A_x = A cos alpha, A_y = A cos beta, A_z =Acos gamma`
`\color{red} ✍️` In general, we have `vecA=A_xhati + A_y hatj + A_z hatk`
`\color{red} ✍️` The magnitude of vector `vecA` is `A=sqrt(A_x^2 +A_y^2 +A_z^2)`
`\color{red} ✍️` A position vector `vecr` can be expressed as `vecr=xhati+yhatj+zhatk`
where `x, y,` and `z` are the components of `r` along `x-, y-, z`-axes, respectively.